Simulering av DP-system (dynamisk posisjonering av fartøy)
Hva oppgaven går ut på
Dynamisk posisjonering (DP) betyr posisjonering av fartøyer vha. posisjonsregulering der trustere (propeller) styres for å holde fartøyet i ønsket posisjon i forhold til f.eks. havbunnen eller en plattform eller et annet fartøy. DP er svært viktig ifm. oljeproduksjon til havs. Det norske firmaet Kongberg Maritime er verdensledende innen DP.
I denne oppgaven skal dere simulere et (noe forenklet) DP-system i LabVIEW.
Utstyr og programvare
- PC med LabVIEW
Organisering
Oppgaver
Først litt bakgrunnsinformasjon: Figur 1 viser hovedkomponentene i et DP-system.
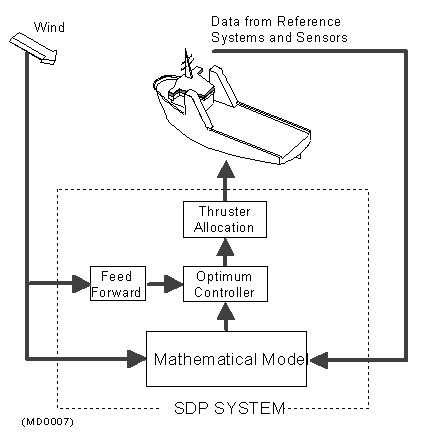
Figur 1. (Kilde: Kongsberg Maritime)
Figur2 viser et fartøy med definisjon av de båtfaste koordinatretningene surge, sway og yaw (det er vanlig å bruke engelske betegnelser også i norsk fagspråk).
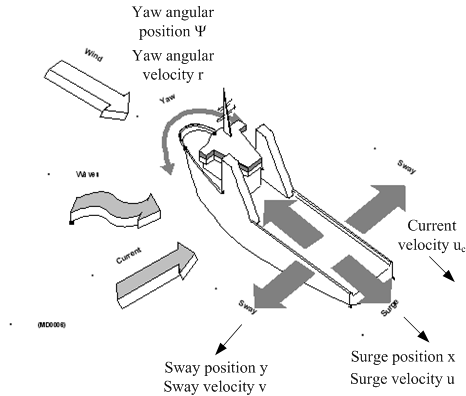
Figur 2. (Kilde: Kongsberg Maritime)
Figur 3 viser sammenhengen mellom et jordfast koordinatsystem og et båtfast koordinatsystem.
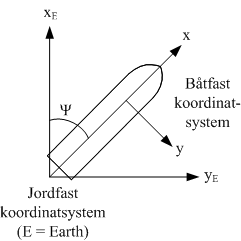
Figur 3
Nedenfor er vist en forenklet matematisk modell av fartøyet. Modellen uttrykker kraftbalansene i surge-retningen og i sway-retningen og samt momentbalansen i yaw-retningen (rotasjonen).
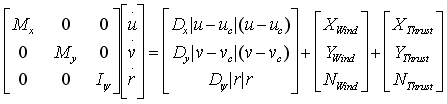
X og Y betyr kraft, og N betyr moment. Subindeks c betyr strøm (engelsk: current). M er masse, og I er treghetsmoment. D er dempekoeffisient. Leddet Dx|u-uc|(u-uc) representerer en hydrodynamisk kraft, Fx. Obs: I likningene ovenfor er u ikke pådrag, men hastighet.
Til orientering: Nedenfor er vist koodinattransformasjonen av hastigheter i det båtfaste koordinatsystemet til hastigheter i det jordfaste koordinatsystemet. (Denne transformasjonen trengs imidlertid ikke i oppgavene nedenfor.)
![]()
I oppgavene nedenfor skal dere for enkelhets skyld betrakte fartøyets bevegelse i kun i surge-retningen. Det er ikke bevegelse i noen andre retninger.
Anta følgende (gjelder for et bestemt testfartøy):
- Mx = 71164 tonn
- Dx = -8.4 kN/(m/s*m/s)
- Langskips vindkraft er gitt ved
XWind = Vw2[cWx1 cos(fi) + cWx2cos(3fi)]
der Vw er vindhastighet relativ båten. fi er båt-relativ vindretning. Dersom vinden kommer rett forfra båten, er fi = 180 grader. cWx1 = 0,1838 og cWx2 = -0,0068 er såkalte 1. og 2. ordens vindkoeffisienter. Eksempel: Med Vw = 20 m/s og fi=180 grader, blir XWind = -70,8 kN. Figur 4 viser ulike vindstyrker.
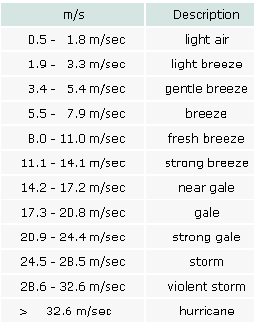
Figur 4: Vindstyrker
- uc varierer typisk i området 0 - 3 m/s.
- Langskips propellkraft XThrust (pådraget på fartøyet) har en begrensning på 552 kN forover og 467 kN bakover.
- Til info (trengs ikke i oppgaven): Fartøyets lengde er Lpp = 233 meter. Bredden er 42 meter. Dypgang er 10 meter.
Kommentar: Innen DP-bransjen sier man "tonn" for en kraft på 1kN, men i denne oppgaveteksten representerer tonn ikke en kraft, men 1000kg (som normalt).
- Implementering av simulator: Implementer en simulator i LabVIEW Simulation Module av et posisjonsreguleringssystem for fartøyets bevegelse i surge-retningen (basert på den første differensiallikningen i fartøymodellen angitt ovenfor). Vindhastigheten, vindvinkelen og vannstrømhastigheten skal være justerbare fra frontpanelet. Vindhastigheten og vannstrømhastigheten kan i utgangspunktet ha verdi 0. Vindvinkelen kan i utgangspunktet settes lik 180 grader. Det er posisjonen (som er integralet av hastigheten u) som skal reguleres. Pådraget er XThrust. Regulatoren skal være en PID-regulator (PID Advanced-blokken i LabVIEW). Tips: Vær konsekvent med enhetene, f.eks. kan dere bruke N som kraftenhet alle steder i blokkdiagrammet. Simulatoren kan ha tidsskritt 1 sekund, og dere kan la den kjøre 100 ganger raskere enn reell tid.
- Regulatorinnstilling: Still inn parametrene i PID-regulatoren ihht. Skogestads metode slik at reguleringssystemet får en responstid på ca. 5min. Skogestads metode for prosesser uten tidsforsinkelse er vist i tabell 7.2 her. Prosessmodellen som da skal brukes, er en dobbelintegrator, dvs. K/s2, som er transferfunksjonen fra pådrag til prosessutgang (posisjon) når leddet Dx|u-uc|(u-uc) i prosessmodellen neglisjeres. (Fasit: Forsterkningen blir 1/Mx.)
-
Reguleringssystemets (DP-systemets) ytelse:
-
Anta at posisjonsreferansen endres som et nokså lite sprang (fra 0m). Virker DP-systemet tilfredsstillende? Med andre ord: Hva blir reguleringsavviket? Hvilken responstid avleses? Stemmer denne responstiden noenlunde med den spesifiserte responstiden?
-
Hvordan klarer DP-systemet å kompensere for konstant vind og konstant vannstrøm (forskjellige fra null)? Med andre ord: Hva blir det stasjonære reguleringsavviket?
-
Hva blir det maksimale reguleringsavviket ved plutselig vindøkning i storm styrke? Implementer foroverkopling fra antatt kjent (målt) vindkraft. Blir reguleringen bedre med en slik foroverkopling? (I virkelige DP-systemer brukes foroverkopling fra vindmåling. Det er også foroverkopling fra vannstrøm, som blir estimert og ikke målt direkte.)
-
[Emnets hjemmeside] [Framdriftplanen]
Oppdatert 2.5.06 av Finn Haugen, lærer. E-postadresse: finn@techteach.no.