![]()
Level Control
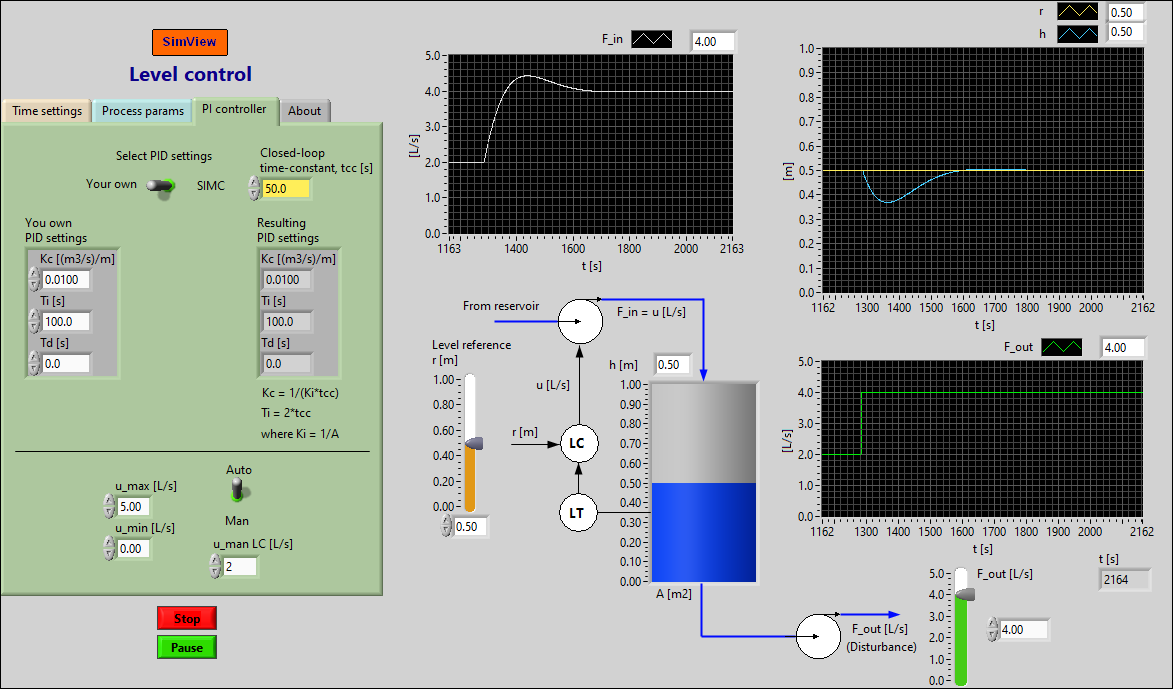
Snapshot of the front panel of the simulator:
- What is needed to run the the simulator? Read to get most recent information!
- Tips for using the simulator.
- The simulator:level_control.exe.
Description of the simulated system
The system being simulated is a level control system based on feedback PI control from level measurement. The PID controller is the LabVIEW PID Advanced function.
The mathematical model of the process to be controlled is based on mass balance of the contents, which is water, of the tank. The mass balance is as follows:
rho*A*dh(t)/dt = Fin(t) - Fout(t)
Here the inflow Fin(t) is assumed to be the same as the pump control signal u(t), hence both are in unit of kg/s. Solving for the time-derivative gives
dh(t)/dt = [1/(rho*A)]*[u(t) - Fout(t)]
which constitutes the process model written as a state-space model. This model will be the basis of the development of the feedforward control action, cf. the tasks below.
Aims
The aim of this simulator is to provide learning about PI level control, including tuning the controller.
Motivation
Level control is common in many branches of the process industry. Level control ensures that the level of the material in a tank is at or sufficiently close to its reference (setpoint).
Tasks
1. Controller tuning: This process is an "integrator" process with integrator gain Ki = 1/A, where A is the cross-sectional area of the tank. Tune the PI controller using Skogestad's SIMC method.Verify with a simulation that the controller behaves as expected with regards to level reference tracking.
2. Try some random PI settings. Do you see a need for a systematic method for PI tuning?Updated 16 December 2023. Developed by Finn Haugen. E-mail: finn@techteach.no.