![]()
NIVÅREGULERING AV BUFFERTANK
- Bilde av simulatorens frontpanel
- Hva trengs for å kunne kjøre simulatoren? Les for å få siste informasjon!
- Tips for bruk av simulatoren
- Simulatoren: buffertank.exe (klikk for å laste ned). Simulatoren kjører umiddelbart etter nedlasting ved å trykke Åpne i nedlastingsvinduet. Alternativt kan du først lagre en kopi av exe-filen på en selvvalgt katalog på PC'en og deretter kjøre exe-filen, hvilket starter simulatoren.
Beskrivelse av det simulerte system
Systemet som simuleres, er en nivåregulert væsketank med innløp og utløp, se simulatorens frontpanel. Den matematiske modellen av tanken kan finnes fra massebalanse:
(1) rho*Adh/dt = winn - wut
der wut = Kuu der u er styresignalet på pumpa (= pådraget fra regulatoren).
Figur 1 viser et blokkdiagram av tankmodellen med reguleringssystem.
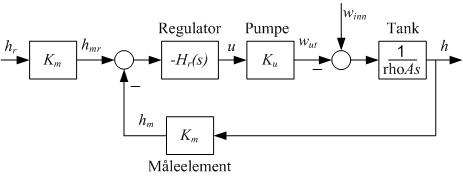
Figur 1
Motivasjon
Tanken kan representere en prosessenhet i en prosesstreng (i en fabrikk el.l.). Tanken fungerer som et buffer ved at variasjoner i innstrømmen dempes, samtidig som det skal være tilstrekkelig mengde av væsken i tanken.
Teori
Innstilling av en PI regulator for nivåregulering er beskrevet i læreboken Praktisk reguleringsteknikk og i PID Control. Kopi av det aktuelle underkapitlet i PID Control.
Oppgaver
- Hva er transferfunksjonen fra w_inn
til w_ut?
Påvis ut fra blokkdiagrammet vist ovenfor (ingen detaljert regning trengs, egentlig, men du kan gjerne vise resultatet ved regning) at transferfunksjonen fra winn til wut er identisk med reguleringssystemets følgeforhold M(s), som er transferfunksjonen fra hmr til hm i blokkdiagrammet.
- Innstilling av regulatorparametrene:
Kjør simulatoren.
- Finn parametre for en PI-regulator ut fra spesifikasjonen om at en frekvenskomponent på 0,04 Hz i winn skal dempes med en faktor lik 5 gjennom tanken, dvs. at wut skal ha amplitude lik 1/5 av amplituden i winn ved denne frekvensen. (Tips: Det blir litt prøving og feiling med f0, og bruk da Bodediagrammet i simulatoren. Merk: De PI-parametrene som fås som funksjon av zeta og f0, må du selv skrive inn i regulatorens parameterfelt.)
- Verifiser med simulering at spesifikasjonen blir oppfylt.
- Blir strømningsdempningen bedre eller dårligere jo mindre frekvensen av strømningsvariasjonen er? Gi svaret ut fra Bodediagrammet, og verifiser resultatet med simulering.
- Hva er fordelen med PI- framfor
P-regulering?
- Hvorfor bør en bruke PI-regulering framfor P-regulering i buffertanken? Demonstrer svaret med simulering.
- Hvorfor trenger en i det hele tatt et reguleringssystem for buffertanken? Holder det ikke med fast pådrag på ut-pumpa? Demonstrer svaret med simulering.
Oppdatert 2. oktober 2004. Utviklet av Finn Haugen. E-postadresse: finn@techteach.no.