![]()
Discrete-Time PID Controller
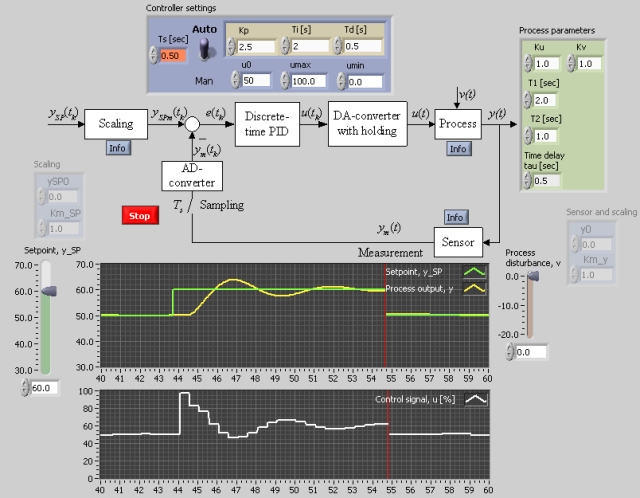
Snapshot of the front panel of the simulator:
- What is needed to run the the simulator? Read to get most recent information!
- Tips for using the simulator.
- The simulator: piddiscrete.exe . The simulator runs immediately after the download by clicking Open in the download window. Alternatively, you can first save a copy of the exe-file on any directory (folder) on your PC and then run the exe-file, which starts the simulator.
Description of the simulated system
Typically, commercial PID controllers of today are implemented as an algorithm running on a computer. The PID algorithm is executed once per time step (sampling interval), Ts. A typical value of Ts is 0.1 sec. The tasks below deomonstrates effects of the discrete-time nature of such computer implemented controllers.
Tasks
Assuming the following parametrers of the process to be controlled (these values are default values of the simulator): Ku=1, Kv=1, T1=2, T2=1, tau=0.5. Controller tuning using the Ziegler-Nichols' ultimate gain tuning method yields
Kp=3.6, Ti=2.0 og Td=0.5
You can apply the above parameter values in the following task.
Start the simulator.
- Set Ts = 0.1. Change the setpoint e.g. as a step. Observe the control signal. Does this signal seem to be almost continuous?
- Increase Ts to 0.5. What does the control signal look like? What has happened to the stability of the control system?
- Find experimentally (on the simulator) for which values of Ts the control system is asymptotically stable.
- Adjust Ts to the value giving marginally stability of the control loop. Readjust the PID parameters so that the loop again becomes asymptotically stable (using e.g. the Ziegler-Nichols' closed loop method). Is the control loop as quick with this new PID setting as with the original setting?
Updated 2 September 2017. Developed by Finn Haugen. E-mail: finn@techteach.no.