
Laboppgave
6 (frivillig):
Stabilitet
av reguleringssystem. Foroverkopling
Målene med
oppgaven
Laboppgaven består av to uavhengige deler: Stabilitet og
foroverkopling.
Målene med oppgaven er:
- Å observere og
forstå hvordan visse parameterendringer kan skape
stabilitetsproblemer for tilbakekoplede reguleringssystemer.
- Implementering av
eksperimentell foroverkopling.
Utstyr
Organisering
Oppgaven
gjennomføres i studentgrupper.
Tid for
gjennomføring er
angitt på emnets hjemmeside. Varighet: 4 timer, kl 1215-1600 (men en kan jobbe med
utstyret fram til
kl 1700 dersom det er behov for det).
Ansvarlig for oppgaven: Emneansvarlig (FH).
Veiledere:
Studentassistenter og emneansvarlig.
Vurdering (godkjenning)
Oppgaven er frivillig.
Dersom gruppen ønsker det, kan den allikevel innen kl. 18
labdagen laste opp en labjournal
i emnets Canvasrom for vurdering (det er ikke nødvendig
å laste opp
LabVIEW-programmet dere bruker).
Om labjournalen
Her er standard
journalforside.
Krav til journalen (som
må
skrives under selve labarbeidet):
- Pdf
- Kortfattet
- Norsk eller engelsk.
- Innhold: Skjermbilder
med en kort tekst til hva bildene
viser. Samme overskrifter som i oppgaveteksten.
- Pdf-dokumentet skal ha
filnavn ihht denne malen:
"IA3112_Laboppgave1_Haugen_Åsen_Dalen.pdf" eller
EK3114_Laboppgave1_Haugen_Åsen_Dalen.pdf.
Forberedelser
Ingen spesielle (ut over kunnskaper og ferdigheter ihht. emnets
undervisningsplan).
Oppgaver
Temperatursettpunktet kan i utgangspunktet settes lik 35
grader C (men skal varieres i løpet av oppgaven). I
utgangspunktet kan dere stille inn luftstrømmen til
maksimal verdi.
Oppgaven tar utgangspunkt i et (forhåpentligvis)
velfungerende PI(D)-reguleringssystem som gruppen benyttet i en
tidligere laboppgave (gjerne LLB_air_heater_temperature_control.llb
fra laboppgave 5). Bruk gjerne følgende
regulatorinnstilling, som bør virke på alle
prosessenhetene: Kp = 0,5 og Ti = 20 s. Evt. kan dere
stille inn regulatoren selv.
- Stabilitetsanalyse:
Finn reguleringssystemets forsterkningsmargin, GM, og fasemargin, PM.
Har GM og PM akseptable verdier?
- Faktorer som
påvirker reguleringssystemets
stabilitet:
Undersøk eksperimentelt hva som skjer
med reguleringssystemets stabilitet ved parameterendringene angitt
i deloppgavene nedenfor. Prøv å forklare den observerte
virkningen som hver av endringen har på reguleringssystemets
stabilitet. Dere kan selv velge hvor store
parameterendringene skal
være, men en endring må være så stor at
effekten av endringen er tydelig. Det kan bli nødvendig å
eksitere reguleringssystemet med et sprang i settpunktet for å
kunne se systemets dynamikk/stabilitetsegenskap.
- Et lite "forskningsspørsmål" til å
begynne med: Bør dere stille tilbake til opprinnelig
parameterverdi mellom
hvert eksperiment?
- Økning av regulatorforsterkningen.
- Reduksjon av integraltiden.
- Økning av målefilterets tidskonstant (en
betydelig økning kan være nødvendig for å
kunne se noen virkning av økningen)
- Omkopling av regulatoren fra reversmodus til
direktemodus. (Regulatoren har ingen revers/direkte-svitsj, men
direktemodus kan realiseres med negativ regulatorforsterkning.)
- Reduksjon av luftstrømmen gjennom prosessen.
- Foroverkopling:
Varierende
luftstrøm kan betraktes som en forstyrrelse på
utløpstemperaturen. Luftstrømmen kan måles
(indirekte) ved å måle innstillingen av den blå
skruen som brukes til å manipulere luftstrømmen. Skruen er
tilkoplet et potensiometer (som er en variabel motstand), og
spenningsfallet over potensiometeret er tilgjengelig på
bøssinger på varmluftprosessen. Spenningen kan derfor
brukes som en måling av luftstrømmen (forstyrrelsen). Det
blir derfor
ialt to AI-signaler som skal leses inn i LabVIEW
(temperaturmålingen og
luftstrømmålingen). Innlesing av multiple AI-signaler er
forklart fra
tidspunktet 27:30 i videoen
Analog IO (input and output) with LabVIEW and NI USB-6008.
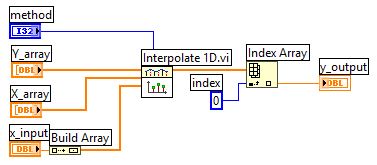
- Implementer eksperimentell foroverkopling basert på
interpolering mellom sammenhørende sett (eller par) av
forstyrrelsesmåleverdier og pådragsverdier funnet med
PI-regulatoren, jf. kap. 7.2. i læreboka. Foroverkoplingen
dere implementerer, skal komme i tillegg til tilbakekoplingen, dvs.
brukes sammen med PID-regulatoren. Husk å endre output range for PID-regulatoren
slik at PID-regulatoren tillates å gi både positive og
negative bidrag til pådragsssignalet. Interpoleringen kan
implementeres vha. den innebygde LabVIEW-funksjonen Interpolate 1D (eksempel på bruk).
- Undersøk
om temperaturreguleringen
er bedre med foroverkopling enn uten (men med PI-regulering i begge
tilfeller). Det er tilstrekkelig om dere gjør en kvalitativ
vurdering
av om reguleringen blir bedre med foroverkopling (dvs. bare
sammenlikner plott). De som ønsker det og har tid, kan
også foreta en
kvantitativ undersøkelse ved å beregne IAE-verdien over et
fast (og
selvvagt) tidsintervall for de to reguleringsstrukturene (med og uten
foroverkopling). IAE-verdien kan beregnes vha. den innebygde funksjonen
Integral x(t) PtByPt
i LabVIEW.
|
{kind=link}