Hřgskolen i Buskerud: Fag SESM3400 Styring av mekatroniske systemer
Lab: PID-regulering med PLS
Hva laben handler om
I denne laboppgaven skal PLS'en Mitsubishi FX2n benyttes for PID-regulering av en likestrřmsmotor. PLS'en har da tilkoplet en tilleggsmodul for analog I/O.
Utstyr
- DC-motor
- PLS'en FX2N med analog I/O-modulen FX0N-3A
- GX IEC Developer
{kind=link}
Informasjon om AI (analog inn) og AO (analog ut) med FX0N-3A i GX IEX Developer
I denne brukerveiledningen stĺr det at man skal bruke funksjonene RD3A_M (RD = read) for AI-operasjoner og WR3A_M (WR = write) for AI-operasjoner. Problemet er imidlertid at disse funksjonene ikke virker pĺ alle FX2N-versjoner! Mitsubishi har imidlertid laget en funksjonsblokk kalt FX0N_3A som sikkert virker. Den er tilgjengelig som én av funksjonsblokkene i et User Library kalt AnalogFX, som er tilgjengelig som en selvutpakkende exe-fil med navn AnalogFX.exe. Dere kan laste ned filen fra http://www.beijer.no (sřk der etter analogfx) og pakke den den ut pĺ et passende sted. I den utpakkede filen fins ogsĺ en hjelp-fil med filtypenavn analogfx.chm. Installering og bruk av et nedlastet (og utpakket) User Library (funksjonsblokker og hjelp-fil) er beskrevet i kap. 4.6 i Manual for GX IEC Developer.
Nĺr du bruker FX0N_3A-funksjonen i en POU, mĺ du fřrst opprette en instans ("kopi") av funksjonen i POU'ens header. Dette gjřres ved ĺ deklarere i headeren en lokal variabel med fritt valgt navn, f.eks. AI_AO_FX0N_3A med datatype (Type) FX0N_3A. Figur 1 viser headeren i et eksempel pĺ en POU. Datatypen velges ved ĺ klikke seg fram til FX0N_3A-funksjonen via knappen med tre prikker i figur 1.
Figur 1 viser ogsĺ hvordan funksjonen kan tas i bruk i en POU. D0, D1 og D2 dataceller (som brukeren fritt kan ta i bruk fritt). M0 er en boolsk datacelle, som her gir staturinformasjon. I eksempelet skrives verdien 100 (integer = heltall) til enhetens AO-kanal, og det avleses verdier fra enhetens to AI-kanaler. Bĺde AO og AI utfřres her med én og samme funksjon. (Datacellene kan benyttes i tilknytninger til funksjoner andre steder i PLS-programmet.) Bĺde AI- og AO-verdiene representeres som heltall i omrĺdet 0 - 255, tilsvarende 0 - 10V (evt. 4 - 20mA for strřmsignal). Du kan endre verdien av D0-cellen ved ĺ dobbelklikke pĺ D0 mens programmet kjřrer (du fĺr da opp et vindu der du kan angi verdien, og deretter fĺr du spřrsmĺl om du vil overfřre den nye verdien til PLS'en).
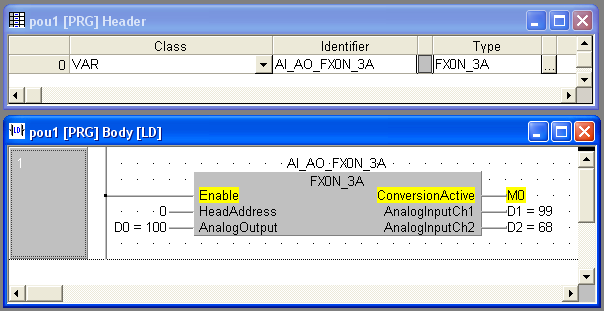
Figur 1
Det er nřdvendig ĺ definere minneceller el.l. til alle terminalene AnalogOutput, AnalogInputCh1 og AnalogInputCh2, selv om du faktisk ikke bruker alle disse terminalene i funksjonskallet.
Informasjon om PID-funksjonen PidFX i GX IEX Developer
Mitsubishi har laget en funksjonsblokk kalt PidFX, som er tilgjengelig i et User Library kalt PidFX, som er tilgjengelig som en selvutpakkende exe-fil med navn PidFx.exe. Dere kan laste ned exe-filen fra http://www.beijer.no. Den selvutpakkende filen inneholder ogsĺ hjelp-filen PidFX.chm. Installering og bruk av et nedlastet (og utpakket) User Library (funksjonsblokker og hjelp-fil) er beskrevet i kap. 4.6 i Manual for GX IEC Developer.
Nĺr du bruker PIDFx-funksjonen i en POU, mĺ du fřrst opprette en instans av funksjonen i POU'ens header. Dette gjřres helt tilsvarende som for FX0N_3A-funksjonen, jf. beskrivelsen ovenfor.
Praktiske opplysninger
Oppgaven utfřres pĺ rom C212/213. Veileder er Finn Haugen.
Forbedelser
- Les om installering av User Library i kap. 4.6 i Manual for GX IEC Developer.
- Installer funksjonsblokkene og hjelp-filene for AnalogFX og PiDFX.
- Les i gjennom de delene av hjelp-filen AnalogFx.chm som gjelder FX0N_3A-funksjonen.
- Les i gjennom de delene av hjelp-filen PidFX.chm som gjelder PidFX-funksjonen. Her er et utdrag av denne hjelp-filen: pidfx_extract_from_help_file.pdf.
Oppgaver
-
Lag (og bruk) et PLS-program som tester AO- og AI-funksjonene pĺ analog I/O-enheten. Programmet skal altsĺ vise om funksjonene virker som forventet eller ikke. Bruk ogsĺ voltmeter for ĺ vćre sikker pĺ at faktisk spenning er lik den spenningen dere kan regne dere fram til ut fra heltallsverdien av ut-spennngen fra FX0N_3A-enheten. Sřrg for at programmets syklustid er 100ms (hřyreklikk pĺ programmets Task, velg deretter Properties, og sett Event til FALSE og Interval til T#100ms).
-
Lag (og bruk) et PLS-program for PID-regulering av motorturtallet. Still inn en PI-regulator (for automatisk regulering). (Tips: Dere kan sette integraltiden lik prosessens tidskonstant, som her kan anslĺs til 0,3s.) Hvor stort blir det stasjonćre reguleringsavviket ved konstant turtallsreferanse? Klarer regulatoren ĺ kompensere stasjonćrt for en tilnćrmet konstant prosessforstyrrelse (lastmoment)?
Tips for programmeringen:-
Programmet kan inneholde 2 nettverk: (1) FX0N_3A-funksjonen, som realiserer bĺde AO og AI. (2): PidFX-funksjonen. Med denne lřsningen vil AO-verdien fra regulatoren faktisk bli omsatt til et fysisk spenningssignal fřrst i neste tidsskritt.
-
Bruk minneceller for settpunktinngangen (og ProcessValue-inngangen) og for hver av utgangene pĺ PidFX-blokken. (Du trenger ikke bruke MOVE_M-funksjoner som i hjelp-filen for PidFX.) Minneceller med navn pĺ formen Dn kan representere hvilken som helst datatype, mens minneceller med navn pĺ formen Mn (dvs. M0, M1, ...) repesenterer boolsk data (dvs. en bit).
-
Oppdatert 15.11.05 av Finn Haugen, lćrer. E-postadresse: finn@techteach.no.