![]()
LQ Optimal Control of Inverted Pendulum
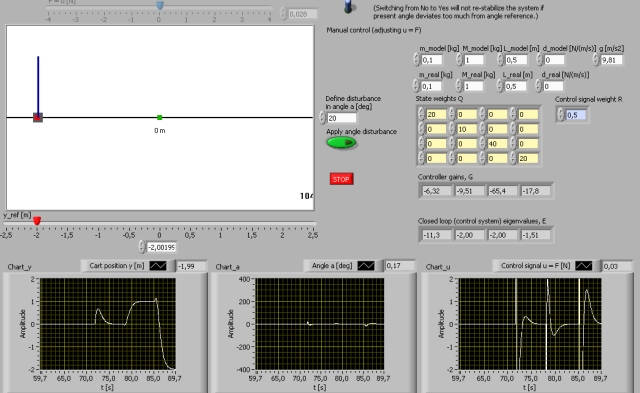
Snapshot of the front panel of the simulator:
- What is needed to run the the simulator? Read to get most recent information!
- Tips for using the simulator.
- The simulator:pendulum.zip (unzip, and open pendulum.exe).
Description of the simulated system
pendulum_model.pdf gives a mathematical desciption of the system - the cart with pendulum, and the stabilizing control system.
Aims
Aims of this simulator is to see how LQ control quite easily can be used to solve a difficult control problem, namely stabilizing an unstable process.
Motivation
The LQ controller is a very powerful control law because it always stabilizes a process, and because the tuning of the controller is quite intuitive via the weights of the states and the control variables in the optimization criterion.
Although the pendulum itself is not a particularly useful process, it has many similarities to important processes:
- In upright position - it is then called an inverted pendulum - it is similar to a rocket being launched.
- In downright position - it is then an ordinary pendulum - it is similar to a crane with load.
Tasks
Unless otherwise stated, set the parameters back to default values after each of the tasks. (This can be done via Edit / Reintialize values to default.)
- Select upright stabilization.
- Is the controller able to stabilize the pendulum after an angle disturbance at any cart position reference (try a number of different references)?
- Theoretical question: How can you change one of the elements of the Q matrix to obtain more damped movement of the cart? Is this verified in a simulation?
- Theoretical question: How can you change the (one) element of the R matrix to obtain smoother control action?Is this verified in a simulation? Is it also verified in the eigenvalues of the control system?
- What is the maximum angle disturbance that the control system can handle?
- To check the robustness of the control system: Assume that the real cart mass, Mreal, is different from the mass, Mmodel, assumed in the design of the controller. Assume that Mmodel = 1 kg. What is the minimum Mreal and what is the maximum Mreal that the control system can handle (before it becomes unstable)? (Find the answer using simulations.)
- Select downright stabilization.
- Set the controller in manual control mode. Apply a disturbance to the pendulum angle. Try to stabilize the pendulum at zero cart position. Easy or difficult?
- Set the controller in automatic control mode. Is the controller able to stabilize the pendulum after an angle disturbance at any cart position reference (try a number of different references)? Is the automatic feedback control better than the manual control?
- Observe that the controller parameters in the downright operating point and in the upright operating point are different. Why are they different?
Updated 8. February 2008. Developed by Finn Haugen. E-mail: finn@techteach.no.