![]()
Vannkoker med temperaturregulering
TechTeach disponerer 4 stk vannkokerigger for temperaturregulering.
Oversikt
Figur 1 viser vannkokerrrigen.
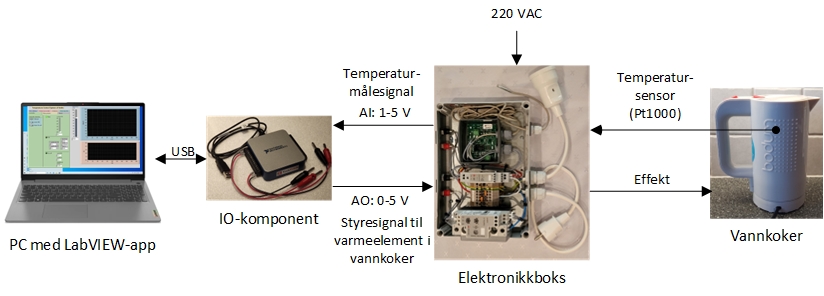
Figur 1: Vannkokerrrigen
Beskrivelse av riggen
Figur 2 viser vannkokeren.

Figur 2: Vannkoker
Figur 3 viser elektronikkboksen.
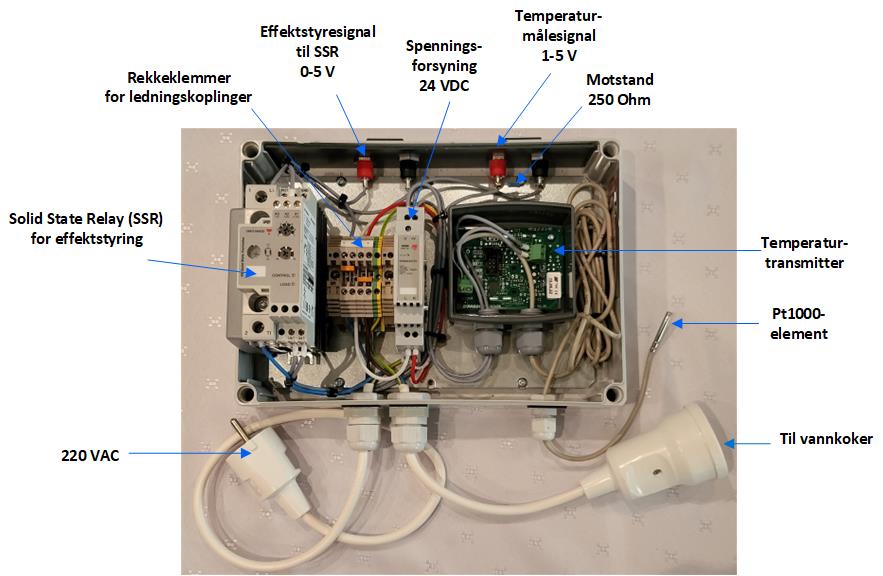
Figur 3: Elektronikkboks
Beskrivelse av vannkokerriggen:
· Vannkokeren (Bodum) har et varmeelement som leverer 700 W når det er tilkoplet nettspenningen (220 VAC).
· Temperaturen i vannkokeren måles med et Pt1000-element, som er en temperatursensor av typen RTD (resistance temperature detector).
· Temperaturtransmitteren genererer 4-20 mA målesignal tilsvarende 0-100 grader C, lineært.
· Strømmålesignalet går gjennom en motstand på 250 Ohm. Spenningsfallet over motstanden brukes som spenningsmålesignal, som blir i området 1-5 V.
· En SSR-komponent styrer effekten levert av varmeelement til vannet i vannkokeren. SSR-komponenten styres med et spenningssignal i området 0-5 V, som gir proporsjonal effekt i området 0-700 W. (For detaljer om sammenhengen mellom styresignalet og effekt, se hjemmesiden for SSR-komponenten nedenfor.)
Teknisk dokumentasjon
· Koplingsskjema v/El-tavle Grenland.
· SSR-komponenten (RGC1P48V30ED, Carlo Gavazzi)
· Temperaturtransmitteren (LLK V2, Produal)
PC
Til hver rigg er det en bærbar PC (Acer Inspire) med følgende programvare:
· LabVIEW Runtime Engine inkl. NI-DAQmx-drivere
· Python (Anaconda-distribusjonen)
· OpenOffice
· Nettleseren Microsoft Edge
LabVIEW-app
En LabVIEW-app (ikke fritt tilgjengelig) brukes for regulering av vannkokeren. Appen kjøres på PC-ene nevnt ovenfor. Figur 4 viser appens frontpanel.
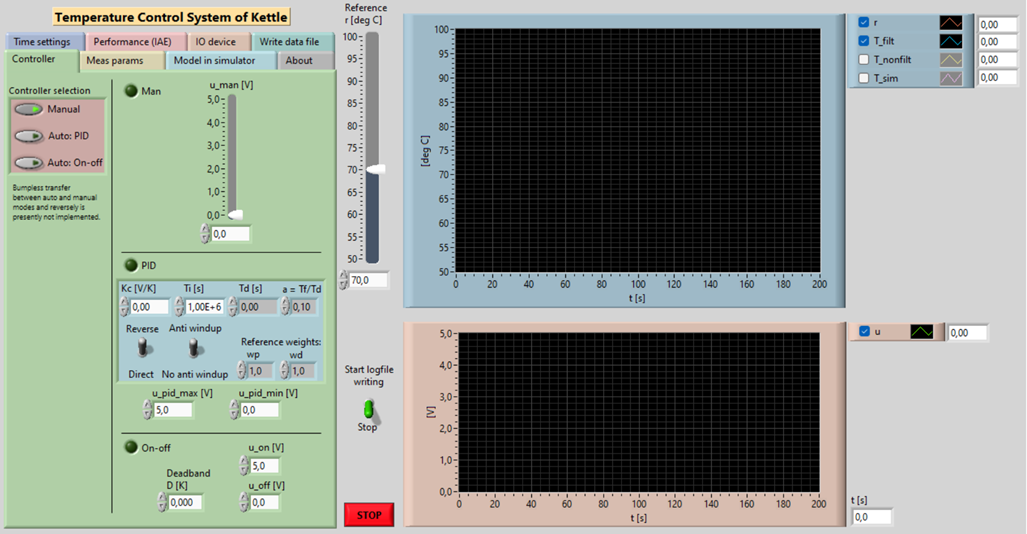
Figur: LabVIEW-appens frontpanel.
Tema
Med ovennevnte utstyr og programvare kan riggen dekke følgende tema:
· Instrumentering av reguleringssystem for temperaturregulering
· Målesignalomregning fra volt til grader C
· Målesignalfiltrering med tidskonstantfilter og middelverdifilter
· Prosessdynamikk: Forsterkning, tidskonstant, tidsforsinkelse
· Manuell regulering
· Automatisk regulering med av/på- regulator
· Automatisk regulering med PID-regulator (P, PI, PID)
· Regulatorinnstilling (Ziegler-Nichols, Åstrøm-Hägglund (rele-metoden), Good Gain, Skogestad)
· Lagring av dataserier på fil og videre behandling i regneark eller Python
· Simulering
(ovennevnte app inneholder en simulator som kjører i
parallell med den virkelige motoren). Simulatoren er basert på
energibalanse:
T’(t) =
[P(t-tdelay)
+ G*(Troom(t)
– T(t))]/C
der T er
vanntemperaturen, T’ er temperaturens tidsderiverte (endring
av T per tidsenhet), P er tilført effekt fra
varmeelementet, G er termisk konduktivitet (varmeovergangstall)
for plastveggen mellom vann og romluft, C er total varmekapasitet
for vannet. tdelay
er en tidsforsinkelse som representerer bl.a. termisk «treghet»
eller «dynamikk» i varmeelementet og en transporttid
fra varmeelementet til temperatursensoren. Tilført effekt
antas proporsjonalt med pådragssignalet
(pådragsspenningen):
P(t)
= Ku*u(t)
der
Ku
er en effektforsterkning (fra V til W).
· Modelltilpassing (optimal estimering av modellparametre fra eksperimentelle tidsserier). Til kan en bruke et ferdigutviklet Python-program som tilpasser modellen ved å finne de verdiene av modellparametrene (f.eks. C og G) som gir beste overensstemmelse mellom eksperimentell og simulert tidsserie. Med «beste» menes minste sum av kvadratisk avvik (prediksjonsfeil) mellom de to tidsseriene.
Lab-rigger som TechTeach disponerer
26.9 2024. Finn Aakre Haugen (finn@techteach.no)