|
Høgskolen i Buskerud: Fag
SESM3400 Styring av mekatroniske systemer
Lab: Innebygget styring (embedded control) med FieldPoint Real-Time
Hva laben handler om
I denne oppgaven skal dere implementere en innebygget regulator (embedded
controller) på FieldPoint Real-time modul.
Utstyr
- PC med LabVIEW m/Real-Time module (RT er installert på minst én av PC'ene).
Obs: For å få brukt FieldPoint i LabVIEW (dvs. for at
LabVIEW skal kunne finne konfigureringsfila generert i MAX), må en ha
administratorrettigheter på PC'en. Kontakt faglærer for informasjon om hvilke
PC'er på C212/213 som har adm.rettigheter.
-
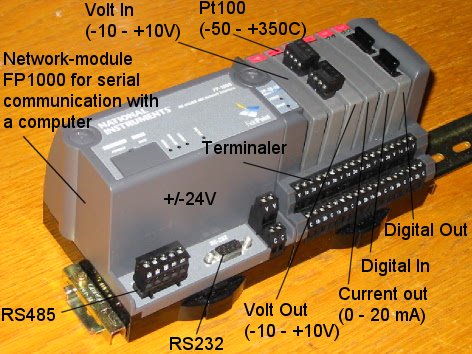
FieldPoint-rack med FP2000-modul og I/O-moduler for analog I/O (spenning).
Obs: Kople ledningen fra AI pluss-utgangen til tachometerets minusutgang og AI
minus-ledning til tachometerets plussinnngang (dette skyldes at
tachometerledningene er ombyttet da labutstyret ble konstruert).
- Krysset Ethernettkabel for kopling mellom PC og FieldPoint.
- Likestrømsmotor
Praktiske opplysninger
Oppgaven utføres på rom C212/213. Veileder er Finn Haugen.
Forbedelser
Finn fram til LabVIEW Real-Time Module User Manual på National
Instruments' hjemmeside. Les raskt igjennom manualen. Les også igjennom
A quick guide
to NI FieldPoint I/O system.
Oppgaver
- Hva kan LabVIEW Real-time brukes til?
- Etabler kommunikasjon med FieldPoint-systemet vha. MAX. Dette
gjøres under Remote Systems i MAX. Her er en prosedyre:
- Først utførerer dere IP-resetting (nullstilling) av
FieldPoint-modulen. Dette gjøres som forklart i brukermanualen for
FieldPoint2000 (finn fram til brukermanualen på nettet). En
nullstilt FieldPoint RT-modul skal etterhvert (etter en del
sekunder) dukke opp med IP-adresse 0.0.0.0 i MAX (automatisk).
- Tilordne deretter en lovlig IP-adresse til FieldPoint-modulen.
En gyldig IP-adresse fås som AND-kombinasjonen av PC'ens IP-adresse
(som kan finnes ved kommandoen ipconfig i Ledetekst-vinduet på
PC'en) og subnettmasken (som også kan finnes vha. ipconfig). Siste
sifferkode i FieldPoint-modulens IP-adresse skal imidlertid alltid
være større enn 1. Dere kan som alternativ til denne manuelle
tildelingen av IP-adressen, la MAX foreta tildelingen ved å klikke
knappen "Suggest Values".
- Konfigurer og test FieldPoint. Dette gjøres via Data Neighborhood
i MAX. Se
A quick guide
to NI FieldPoint I/O system.
- Lagre FieldPoint-konfigureringen på en selvvalgt fil (MAX-meny:
Tools / FieldPoint / Save As.) (Denne filen blir brukt i LabVIEW for å
adressere I/O-kanalene der.)
Obs: Etter at dere er ferdige med MAX, må dere lukke MAX (før
dere begynner med LabVIEW-programmeringen).
- Implementer et turtallsreguleringssystem for likestrømsmotoren.
Som regulator skal dere bruke PID Advanced-funksjonen i LabVIEW (den
fins på Control-paletten på funksjonspaletten). Realiser den sykliske
programkjøringen vha. while-løkke (på vanlig måte). Syklustiden
(tidsskrittet kan være f.eks. 20ms). Brukbare PI(D)-parametre er Kp =
2,5, Ti = 0,01min = 0,6s, Td = 0. Regulatoren skal
kjøre som "embedded" på FieldPoint2000-modulen. I den forbindelse er
det nødvendig å svitsje "execution target" fra LabVIEW (på PC'en) til
FieldPoint, samt å sørge for at VI'en blir lastet ned til FieldPoint,
jf. sidene 2-1, 2-2 og 2-3 i LabVIEW Real-Time Module User Manual.
A quick guide
to NI FieldPoint I/O system beskriver hvordan dere realiserer
FieldPoint-I/O i LabVIEW.
- Bonus-moro: Sørg for at turtallsreferansen er sinusformet (bruk en
passende Point-By-Point-funksjon). Last ned og kjør VI'en "embedded"
på FieldPoint RT-modulen. Kople modulen fra PC'en. Er du overbevist om
at her er det "embedded control"?
Oppdatert 10.11.05 av Finn Haugen,
lærer.
E-postadresse: finn@techteach.no.
|
{kind=link}